Laporan Akhir 1 Modul 3
2. Buat program untuk mikrokontroler Raspberry Pi Pico di software Thonny.
3. Inputkan program ke dalam mikrokontroler melalui USB.
4. Setelah program diinputkan, uji rangkaian yang telah dirangkai sesuai dengan output yang ditentukan.



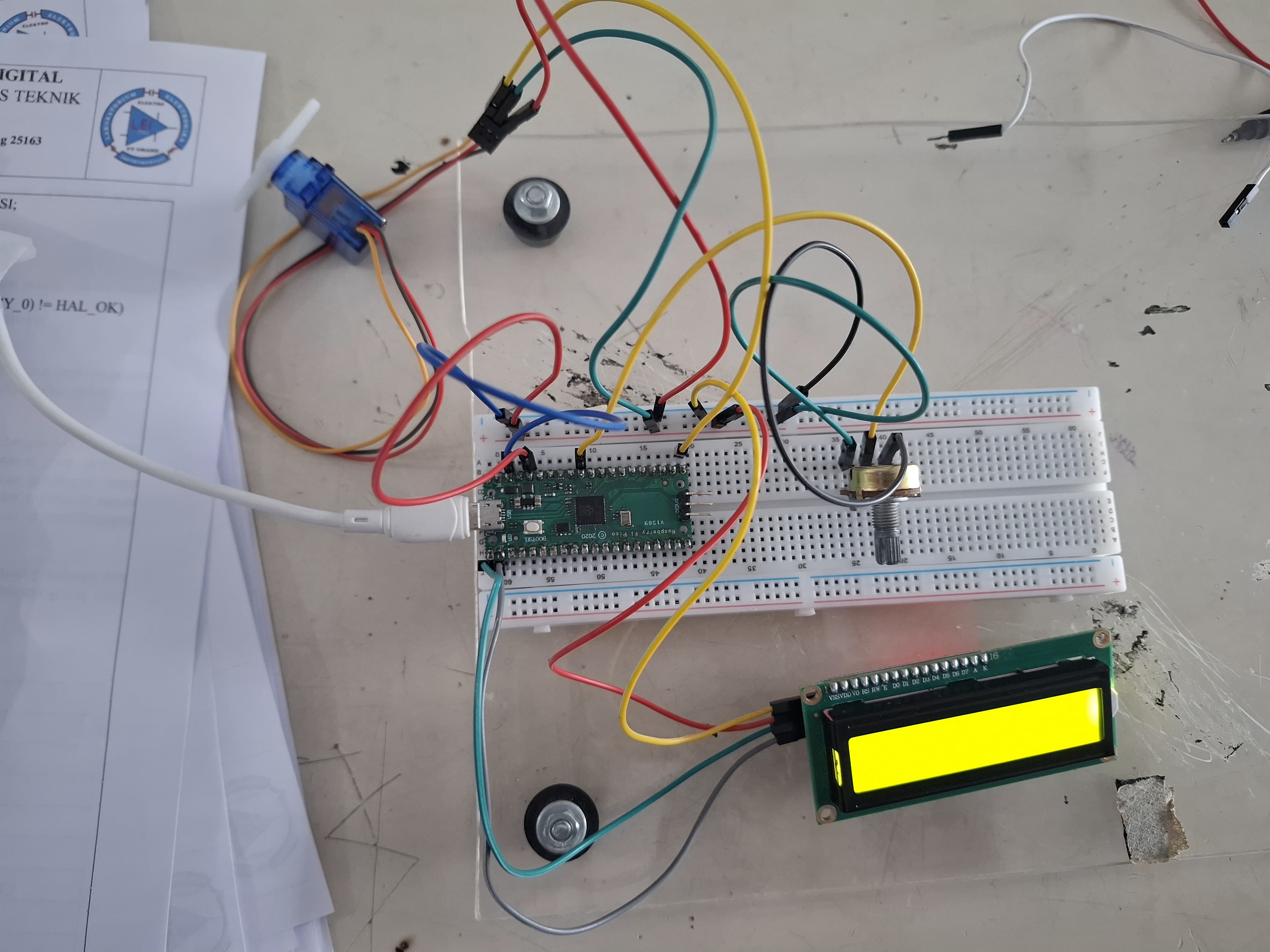
Sistem ini menggunakan Raspberry Pi Pico sebagai pengendali utama yang mengatur interaksi antara potensiometer, motor servo, dan LCD melalui jalur komunikasi dan kendali masing-masing. Potensiometer berfungsi sebagai sensor input yang menghasilkan tegangan analog berdasarkan posisi putarnya. Tegangan ini dibaca oleh pin ADC pada Raspberry Pi Pico dan dikonversi menjadi nilai digital yang merepresentasikan sudut tertentu.
Nilai sudut ini digunakan untuk mengontrol posisi motor servo. Raspberry Pi Pico menghasilkan sinyal PWM (Pulse Width Modulation) melalui salah satu pin digital, lalu mengirimkannya ke pin sinyal servo. Motor servo merespons dengan memutar porosnya sesuai lebar pulsa PWM yang diterima, mengikuti nilai sudut dari potensiometer. Raspberry Pi Pico juga mengirimkan informasi sudut tersebut ke LCD menggunakan protokol I2C melalui dua jalur, SDA dan SCL. Modul LCD sebagai slave menerima data karakter dari Raspberry Pi Pico untuk ditampilkan secara real-time. Dengan cara ini, seluruh komponen bekerja secara terintegrasi: potensiometer sebagai input, Raspberry Pi Pico sebagai pengendali, motor servo sebagai aktuator, dan LCD sebagai media output.






Komentar
Posting Komentar